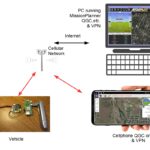
Pixhawk is a widely-used open-source hardware platform for autopilot and drone control, developed by the PX4 community. It is employed in various Unmanned Aerial Vehicles (UAVs), rovers, boats, and robotic systems. Pixhawk provides robust features for autonomous flight, making it ideal for both hobbyists and professionals in the field of robotics and UAV development.
This article explores the features of Pixhawk, its role in drone technology, and some key alternatives, offering a technical comparison of flight controllers to help you choose the best platform for your project.
What is Pixhawk?
Pixhawk is an advanced flight controller equipped with powerful processing capabilities and sensors. Its modular, scalable design allows users to integrate it with different peripherals and extensions like GPS, telemetry radios, cameras, and gimbals. The main functionality of Pixhawk includes autonomous navigation, control of fixed-wing and multirotor drones, and support for multiple communication protocols.
Key Features of Pixhawk:
- Modular Design: Supports various external devices.
- High Precision IMUs: For improved stability and flight control.
- Support for Multiple Platforms: Compatible with ArduPilot and PX4 firmware.
- Fail-Safe Mechanisms: Enhanced reliability with redundant sensors.
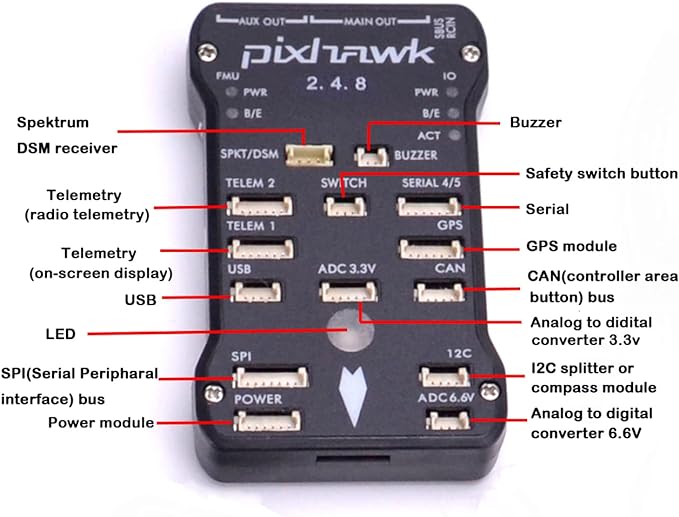
- Expandable: USB, I2C, CAN, UART ports for extended compatibility with devices.
- Real-Time Operating System (RTOS): Ensures smooth operation with low-latency processing.
Alternatives to Pixhawk
While Pixhawk is one of the most versatile flight controllers available, there are several alternatives that offer distinct advantages depending on your specific needs.
- Navio2
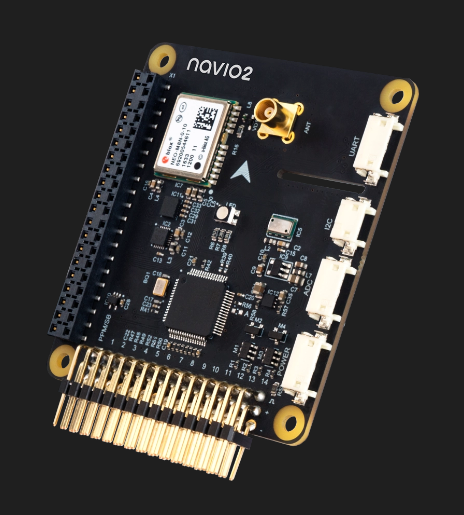
- Developed by Emlid, Navio2 is an add-on board for Raspberry Pi that transforms it into a flight controller. It is particularly appealing for DIYers who are comfortable with Raspberry Pi.
- Kakute F7
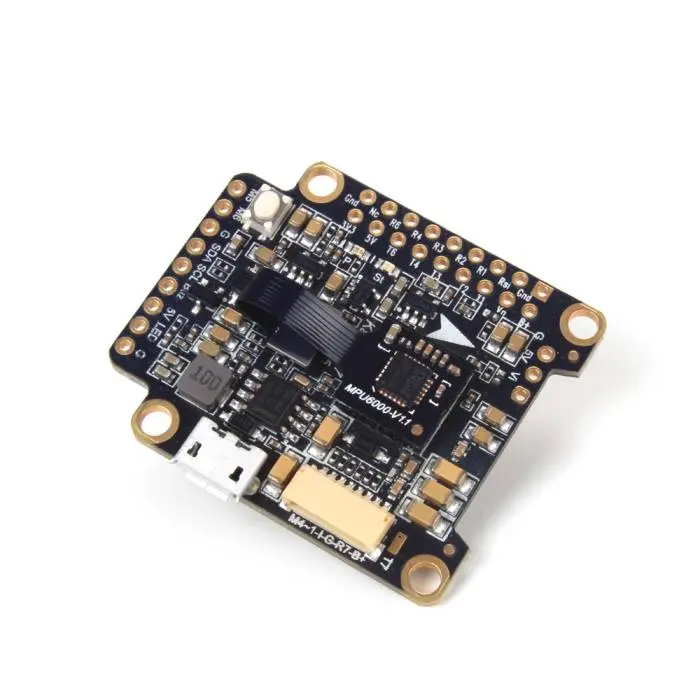
- Manufactured by Holybro, the Kakute F7 is an affordable alternative for smaller drones. It features advanced IMUs and is known for its versatility in FPV (First-Person View) racing drones.
- CUAV V5+

- CUAV V5+ is an advanced flight controller that is compatible with both PX4 and ArduPilot firmware. It is popular for high-end commercial drones and offers high redundancy and advanced power management features.
- Mateksys F405-Wing
- Designed for fixed-wing aircraft, this flight controller offers a cost-effective solution with reliable performance. It is compatible with ArduPilot and INAV firmware.
Features Comparison Table
| Features | PixHawk | Navio2 | Kakute F7 | CUAV V5+ | Mateksys F405-Wing |
| Processor | STM32F7 | Broadcom ARM (via Raspberry Pi) | STM32F7 | STM32F7 | STM32F4 |
| Firmware Support | ArduPilot, PX4 | ArduPilot, PX4 | Betaflight, INAV, ArduPilot | ArduPilot, PX4 | ArduPilot, INAV |
| IMU | Dual IMU | Integrated with RPi | Single IMU | Dual IMU | Single IMU |
| GPS Support | Yes | External Module | External Module | Yes | External Module |
| Telemetry Support | Yes (Multiple Protocols) | Yes (Via Raspberry Pi) | Yes (External Modules) | Yes | Yes |
| Power Management | Built-in with fail-safes | Dependent on RPi | External BEC | Advanced Power Management | Built-in |
| Expansion Ports | USB, I2C, CAN, UART | GPIO (via Raspberry Pi) | UART, I2C | CAN, UART | UART, I2C |
| Target Applications | Multirotor, Fixed-wing, UAV | DIY, Research, Custom Drones | FPV Drones, Racing Drones | Commercial UAVs | Fixed-wing UAVs |
| Price | $160 (Buy on Amazon ) | $199 (Check Official Website) | $45 | $488 (Buy On Amazon) | $63.5 (Buy On Amazon ) |
Why Choosing Pixhawk ?
Pixhawk is often considered the best flight controller, especially for more demanding and professional applications, due to its technical advantages over other alternatives. Here are some tangible arguments:
1. Redundant Systems and Fail-Safes
- Dual IMUs: Pixhawk typically features redundant IMUs (Inertial Measurement Units), which provide improved reliability and fail-safe mechanisms. If one sensor fails, the other can take over, enhancing the overall safety of the drone.
- Power Redundancy: Pixhawk has built-in power management with multiple power inputs (primary and backup). This ensures that the flight controller continues functioning even if one power source fails, which is critical in mission-critical or industrial applications.
Alternatives Comparison: Most alternatives, like Kakute F7 or Mateksys F405-Wing, only have single IMUs, limiting fail-safes and redundancy.
2. Advanced Processing Power
- STM32F7 Processor: Pixhawk uses the STM32F7 microcontroller, which has a high-performance ARM Cortex-M7 core. This provides ample processing power for handling complex tasks, such as real-time sensor fusion, navigation, and data logging, without delays or overloads.
Alternatives Comparison: While the CUAV V5+ also uses the STM32F7, other alternatives like Mateksys F405-Wing use an STM32F4, which is slower and less capable of handling heavy data loads efficiently. Navio2 relies on a Raspberry Pi’s processor, which, while versatile, depends heavily on the Pi’s configuration and performance.
3. Wide Firmware Support
- Dual Firmware Compatibility: Pixhawk supports both ArduPilot and PX4, two of the most advanced and feature-rich open-source autopilot platforms. ArduPilot is known for its vast configurability and community support, while PX4 is optimized for high-performance real-time applications.
Alternatives Comparison: Most alternatives either limit support to ArduPilot (like Mateksys F405-Wing) or are not as well-optimized for both major firmware platforms.
4. Advanced I/O and Expansion Capabilities
- Multiple Expansion Ports: Pixhawk comes with USB, I2C, UART, CAN, and SPI ports, allowing for a wide range of sensor and peripheral integrations (such as GPS, telemetry radios, LiDAR, cameras). This makes it suitable for projects requiring significant expansion.
Alternatives Comparison: Navio2, for instance, uses GPIO pins from the Raspberry Pi, which is more complex and limited in expansion for non-standard peripherals. The Kakute F7 and Mateksys F405-Wing have fewer ports, limiting device compatibility.
5. High Precision GPS Integration
- Pixhawk’s tight integration with GPS modules and RTK (Real-Time Kinematic) GPS systems offers centimeter-level accuracy, which is crucial for applications requiring precise positioning, like mapping or autonomous flight in constrained environments.
Alternatives Comparison: While alternatives like Navio2 and CUAV V5+ also support high-precision GPS, some lower-end options like Kakute F7 don’t offer this level of GPS accuracy out-of-the-box and require additional hardware and software configurations.
6. RTOS for Real-Time Performance
- Real-Time Operating System (RTOS): Pixhawk runs on an RTOS, which ensures that critical flight operations have low latency and high priority. This is vital for drones performing tasks that need split-second decision-making, such as obstacle avoidance or high-speed maneuvers.
Alternatives Comparison: While the CUAV V5+ also supports RTOS, options like Navio2 are dependent on Linux, which isn’t optimized for real-time performance, making it potentially slower for real-time operations.
7. Better Community Support and Documentation
- Strong Community and Documentation: The Pixhawk project is supported by a large and active community, contributing to firmware, documentation, and troubleshooting. It’s much easier to find resources for resolving issues, implementing new features, or expanding functionality when using Pixhawk compared to many alternatives.
Alternatives Comparison: Though Navio2 and CUAV V5+ have active communities, they are not as large or well-documented as Pixhawk’s, making learning curves steeper for beginners and intermediate users.
In conclusion, Pixhawk stands out as a versatile and feature-rich flight controller, supporting a wide array of drone applications. However, alternatives like Navio2, Kakute F7, CUAV V5+, and Mateksys F405-Wing offer specialized solutions that may better fit certain use cases, from FPV racing to research-oriented projects or fixed-wing UAVs.
When selecting a flight controller, consider factors like processing power, firmware compatibility, telemetry support, and the specific requirements of your project